

If you’re just starting out with RTK (Real-Time Kinematic) surveying, you may quickly discover that the equipment and terminology can sound rather alien if you have not encountered it before. With RTK surveying becoming widely used in a variety of different fields like land development, construction, mapping, and agriculture it can help to learn the language around RTK. Terms like “GNSS,” “base station,” and “multipath errors” might not be immediately clear if you’re new to the space.
This guide aims to break down the jargon, providing a beginner-friendly explanation of the most common terms in RTK surveying. Understanding these basics will give you a solid foundation, and ensure that you are asking the right questions to your equipment supplier. Let’s dive into the key concepts and equipment used in RTK surveying.
Before diving into the specifics of RTK meaning, it helps to understand the surveying meaning in the broader sense. Surveying is the science and practice of determining the precise positions of points and the distances and angles between them on or near the Earth’s surface. It forms the foundation of nearly all land development, construction, mapping, and infrastructure work, if something needs to be built, planned, or legally defined in space, surveying is involved.
Historically, surveyors relied on optical instruments like theodolites and levels to measure angles and distances manually. Today, the discipline has evolved significantly. GNSS technology, and RTK in particular, has transformed what was once a slow, labor-intensive process into one that can be completed by a single operator in a fraction of the time, with greater accuracy than was previously possible.
The surveying meaning also extends beyond land boundaries. Modern surveying encompasses topographic mapping, construction stakeout, machine control, GIS data collection, precision agriculture, and more. RTK is now one of the primary tools used across all of these applications, which is why understanding the terminology around it is so valuable.
RTK is the acronym for Real-Time Kinematic, a technique used to enhance the precision of GNSS (Global Navigation Satellite System) signals. While consumer GPS units (like your phone) can provide location data within a few meters of precision, RTK systems can improve this to within a centimeter or even sub-centimeter level.
RTK achieves this level of accuracy by using two receivers: a base station and a rover. The base station is placed in a fixed location with known coordinates, while the rover is mobile and moves around the site. The base station continuously gathers satellite data and sends correction signals to the rover, which adjusts its location data in real-time based on those corrections. This makes RTK surveying ideal for applications like precision mapping, construction, and even autonomous vehicle navigation.

GNSS, or Global Navigation Satellite System, is the overarching term for all satellite-based navigation systems, including GPS (Global Positioning System: USA), GLONASS (Russia), Galileo (European Union), and BeiDou (China). While people often use “GPS” to refer to satellite navigation in general, it’s just one part of the larger GNSS ecosystem.
In RTK surveying, GNSS plays a crucial role by providing signals from multiple satellite constellations. A higher number of available satellites means more data, which improves the accuracy of the position calculated by both the base station and rover. By accessing GNSS, RTK systems can correct for errors caused by atmospheric conditions, clock discrepancies, and satellite orbit variations, resulting in much more reliable positioning.
When talking to salesmen, or long-time users of RTK, you probably hear them mention constellations in relation to their RTK setup. When referring to constellations in RTK, it is often used interchangeably with GNSS. Constellation again refers to the group of satellites that make up one of the above-mentioned satellite systems.
In general, the more constellations (or GNSS systems) that your receiver has access to the better your receiver will perform in difficult environments. For more information on why that is the case, check out the below video.
A Base Station is one of the key components of an RTK system. It’s a fixed GNSS receiver that stays in one location, typically with a precisely known position. The base station collects signals from satellites and compares them to its set coordinates, identifying any errors in the satellite data. These errors can be caused by a variety of different factors, including multipath, interaction with the ionosphere and more.
It then sends these error corrections to the rover in real-time (the Real-Time Kinematic part of the setup). Because the base station’s position is constant, it can continuously monitor and correct discrepancies in the satellite signals caused by atmospheric delays, satellite orbit variations, and other factors. This allows the rover to determine its position much more accurately than it could using only satellite data.
In some setups, you may need to deploy your own base station on-site, however, you can also connect to a nearby base station or network of stations via the internet if available. Services like our own StormCaster, Leica’s SmartNet or Local State CORS are all great options.
The Rover is the mobile component of an RTK surveying system. While the base station remains fixed, the rover is equipped with a GNSS receiver and moves around the area being surveyed. It receives raw satellite data from the GNSS satellites and correction data from the base station. By applying the correction data to the data it sees from the satellites, the rover calculates its highly accurate position in real-time. This means that the base and rover must see the same satellites in order for an RTK solution to be found.
Rovers are typically mounted on a pole, attached to a tripod, or integrated into moving equipment such as drones, tractors, or vehicles. They are used in a wide range of applications, including creating maps, guiding construction machinery, or even for autonomous navigation in precision agriculture. Their ability to produce centimeter-level accuracy is what makes them so valuable for projects where precise positioning is essential.
Correction Data is the real-time information transmitted from the base station to the rover. This data allows the rover to adjust its position relative to the base, accounting for errors caused by things like atmospheric interference and satellite position inaccuracies.
The base station calculates this correction data by comparing its known fixed location to the satellite data it receives. This discrepancy (error) is then sent to the rover, which applies the correction to its own satellite data, allowing it to determine an accurate position relative to the base.
Correction data can be transmitted via radio signal, through cellular networks using internet protocols, or even recorded for post-processing (PPK). The real-time transmission of this correction data is what gives RTK its wide range of applications.
A Survey Antenna is an essential component of an RTK receiver, as it is what captures the GNSS satellite signals. The performance of the antenna directly affects the accuracy and reliability of the positioning data. Survey antennas are designed to pick up satellite signals from all directions, while minimizing signals that have been reflected, providing a continuous and accurate stream of data to the GNSS board on the receiver.
There are different types of antennas used in RTK, including choke ring antennas and helical antennas. Choke ring antennas are designed to reduce multipath errors (where signals bounce off surfaces), making them ideal for use in areas with lots of reflective surfaces like urban environments and most often found in survey grade receivers. Helical antennas are lightweight and often used in drones and handheld systems. The choice of antenna can impact the quality of data, particularly in challenging environments.
The GNSS Board is a physical hardware component within a GNSS receiver that integrates various parts of the system, including the GNSS engine, communication interfaces, and sometimes power management units. This board serves as the foundation for the receiver’s functionality, providing the necessary electronics to track satellite signals, apply correction data, and communicate positioning information to other devices, such as computers or data collectors.
In RTK surveying, the GNSS board plays a crucial role in ensuring that all parts of the system work together efficiently. Modern GNSS boards are compact yet powerful, capable of supporting multiple satellite constellations and handling real-time correction data from base stations or RTK networks. A high-quality GNSS board ensures fast signal acquisition, stable data processing, and enhanced accuracy, making it a critical component in any RTK system.
The GNSS Engine is the core processing unit within a GNSS receiver that handles satellite signal tracking and positioning calculations. In RTK surveying, the GNSS engine is responsible for interpreting raw satellite signals from multiple constellations (such as GPS, GLONASS, Galileo, and BeiDou) and determining the device’s precise location. It does this by using algorithms to compute positions based on the signals’ time delays and frequencies.
In RTK systems, the GNSS engine also processes correction data from a base station, applying real-time adjustments to improve accuracy down to the centimeter level. The performance of the GNSS engine directly impacts the system’s positioning speed and precision. High-quality engines are designed to manage a large number of satellite signals simultaneously, ensuring reliable positioning even in challenging environments, such as dense urban areas or under tree canopies. For anyone working in surveying or related fields, the GNSS engine is vital to achieving the high accuracy required for precision mapping, construction, and navigation. See below for an example of how much of a difference an RTK engine can make in performance in difficult environments.
When talking about UHF, we are referring to the communication method that the receiver is using. With UHF, an internal or external radio is used to transmit correction data from the base station to the rover in real-time via radio waves. UHF (Ultra High Frequency (400-470 MHz) radio signals are favored because they can cover long distances (up to 10-20 kilometers in some cases), provided there are no major obstructions like mountains or dense forests.
The UHF radio link must be reliable because any loss of signal can reduce the precision at the rover. Factors that affect UHF signal quality include the terrain, distance between base and rover, and any interference from other electronic devices. Some RTK systems also offer VHF (Very High Frequency (900 MHz Range) options or even cellular communication as an alternative when UHF is impractical.
An RTK Network is an alternative to using a single base station. In an RTK network, multiple base stations are positioned across a large area, often covering an entire region. These base stations work together to provide correction data to rovers anywhere within the network. One of the key advantages of an RTK network is that you don’t need to set up your own base station on-site. Instead, you connect to a network (sometimes referred to as CORS – Continuously Operating Reference Stations), which broadcasts correction data over a large area. This is particularly useful for surveyors working in wide geographical areas who need consistent accuracy across long distances. The downside of RTK networks is that in order for them to work, you need to have both cellular coverage and nearby base stations.

NTRIP is a protocol that allows correction data to be sent from an RTK network (or base station) to a rover via the internet, rather than through a direct radio link. With NTRIP, you can receive RTK correction data from an RTK network by using a cellular connection, making it ideal for situations where long-range radio signals are unreliable or impractical.
NTRIP provides flexibility, allowing surveyors to work in remote areas or connect to base stations that are located far from their immediate worksite. This technology has become more common as cellular networks expand their coverage and reliability.
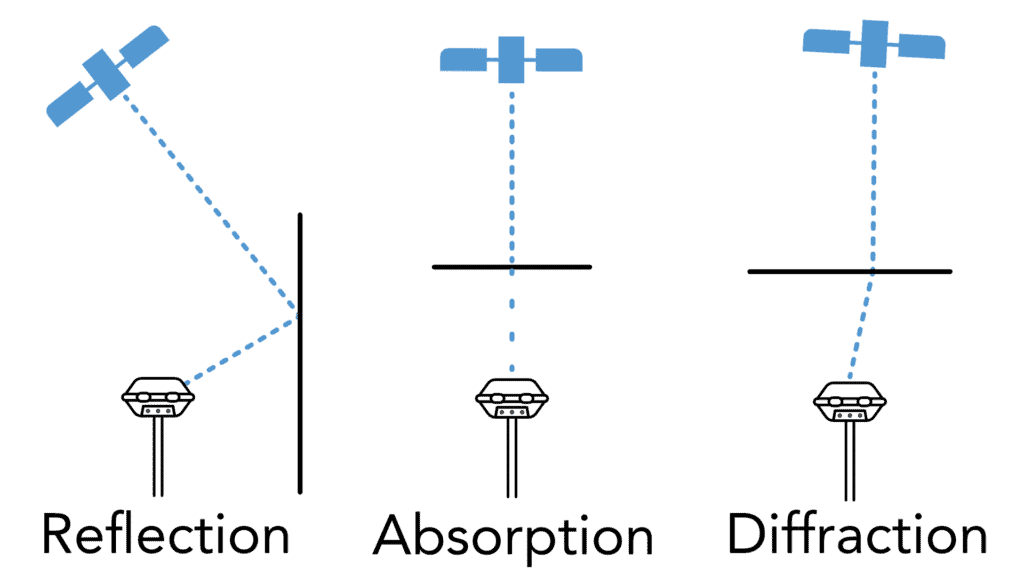
Multipath Errors occur when GNSS signals reflect off surfaces (such as buildings, trees, or the ground) before reaching the receiver. This can cause inaccuracies in the calculated position, as the reflected signals take longer to reach the receiver, giving the impression that the satellite is further away than it actually is.
RTK systems include methods for minimizing multipath errors, but it remains a challenge in environments with many reflective surfaces. Surveyors can reduce these errors by carefully choosing the location for the base station (in open areas away from buildings or water) and using modern RTK receivers with access to the latest constellations and signals which are designed to minimize the effects of multipath.
The Ionosphere is a layer of Earth’s atmosphere, located approximately 50 to 600 miles above the surface, and plays a critical role in how GNSS signals travel from satellites to ground-based receivers. This layer is ionized by solar radiation, which means it contains a large number of charged particles that can interfere with radio signals, including those used in RTK surveying.
As GNSS signals pass through the ionosphere, they experience delays and slight distortions, which can reduce the accuracy of the positioning data. These ionospheric delays are one of the main sources of error in GNSS positioning systems. The amount of delay varies depending on factors like the time of day, solar activity, and geographical location. During periods of high solar activity or near the equator, ionospheric disturbances can be particularly strong, leading to greater positioning errors. For more information on the affect the ionosphere has on RTK see this article: Factors Affecting RTK Performance: An In-Depth Guide for Surveyors.
A Geoid Model represents the Earth’s gravitational field and is used in RTK surveying to convert satellite-based ellipsoidal heights to orthometric heights (essentially the height above sea level). Since GNSS systems measure height relative to a mathematical ellipsoid (a simplified model of the Earth), the geoid model helps adjust these heights to reflect real-world elevations. In effect the Geoid effects for what the Earth actually is, a horribly misshapen lumpy spherish shape.
For surveyors, geoid models are important for ensuring accurate elevation measurements. Without a geoid model, the height data collected by an RTK system might be precise but not meaningful in terms of actual ground level, which can lead to inaccuracies in tasks like land surveying or construction planning. There are different models depending on where you are located, with examples including Geoid 12 or Geoid 18 in the US and CGG2013 or HT2.0 in Canada. There is also a homologated Canada and US model in the works.

When discussing Accuracy and Precision in RTK surveying, it’s important to note that they are not the same thing. Accuracy refers to how close the measured position is to the true position, while Precision refers to how consistently the system can provide the same measurement under the same conditions.
Several factors influence RTK accuracy, including satellite geometry, atmospheric conditions (such as ionospheric delays), and the quality of the base station’s signal. In ideal conditions, RTK systems can provide horizontal precision under a centimeter and vertical precision within 1.5 centimeters. By performing a localization, you can improve your accuracy. Check out the video below for more information.
There are a lot of different terms that you will probably hear as you use your equipment. Here are some more free resources you can use to learn:
RTK surveying is a powerful technology that enables extremely precise positioning, but it comes with a unique set of terms and equipment that can be challenging for beginners. By understanding key terms like GNSS, base station, rover, correction data, and RTK networks, you can begin to grasp how the system works as a whole.
As you continue to explore RTK technology, you’ll find that mastering these basics will allow you to make better decisions when choosing equipment, setting up surveys, and interpreting the results. With practice, RTK surveying can become an invaluable tool in your professional toolkit, providing accuracy and efficiency in a wide range of applications.
Bench Mark Equipment & Supplies is your team to trust with all your surveying equipment. We have been providing high-quality surveying equipment to land surveyors, engineers, construction, airborne and resource professionals since 2002. This helps establish ourselves as the go-to team in Calgary, Canada, and the USA. Plus, we provide a wide selection of equipment, including global navigation satellite systems, RTK GPS equipment, GNSS receivers, and more. We strive to provide the highest level of customer care and service for everyone. To speak to one of our team today, call us at +1 (888) 286-3204 or email us at [email protected]
