

In our everyday lives, we rely on the Global Positioning System (GPS) for navigation, whether it’s for driving directions or tracking packages. For these uses, typical GPS is accurate enough, generally within a few meters. However, when it comes to land surveying—where measurements need to be accurate within a few centimeters—regular GPS just won’t cut it. A few feet of error can significantly impact projects like property boundary establishment, construction, and agricultural planning. For professionals, they need equipment that can provide them a solution to within a centimetre.
Real-Time Kinematic (RTK) GPS is a technology that improves the accuracy of GPS to an astonishing level, often within a few centimeters. RTK GPS achieves this by using a fixed base station that provides real-time corrections to a mobile receiver, or rover, in the field. These corrections help eliminate the sources of error that affect regular GPS, allowing for highly precise positioning. In this article, we’ll explore how RTK GPS works, explain the principles of real-time correction, and detail the process of signal transmission that makes this precision possible.
The Core Principles of RTK GPS
Accuracy and Precision in RTK Surveying
Error Sources and Correction in RTK GPS
Applications of RTK GPS in Surveying and Beyond
To understand RTK GPS, it’s essential to start with the basics of how a standard GPS receiver works. GPS is a satellite-based navigation system that provides location information to a receiver on Earth. It is the American version of the overall GNSS (Global Navigation Satellite System) network. Individually, GPS comprises 24 satellites orbiting Earth in such a way that at any given time, a GPS receiver can connect to at least four satellites. Other constellations like GLONASS, BeiDou, and Galileo also have 24-32 satellites each orbiting the earth.
To determine its position on the Earth, a receiver measures the time it takes for signals to travel from the satellites to the receiver. Since the radio signals transmitted by the satellites travel at a known speed, a GPS receiver can use the time delay of the signal leaving the satellite to arriving at the receiver to calculate the distance to an individual satellite. In order to calculate an accurate position through trilateration, a receiver requires a minimum of 4 satellites of the same constellation. For a really in-depth look at how GPS positions are calculated, check out this article: Basics of the GPS Technique: Observation Equations – Geoffrey Blewitt 1997.
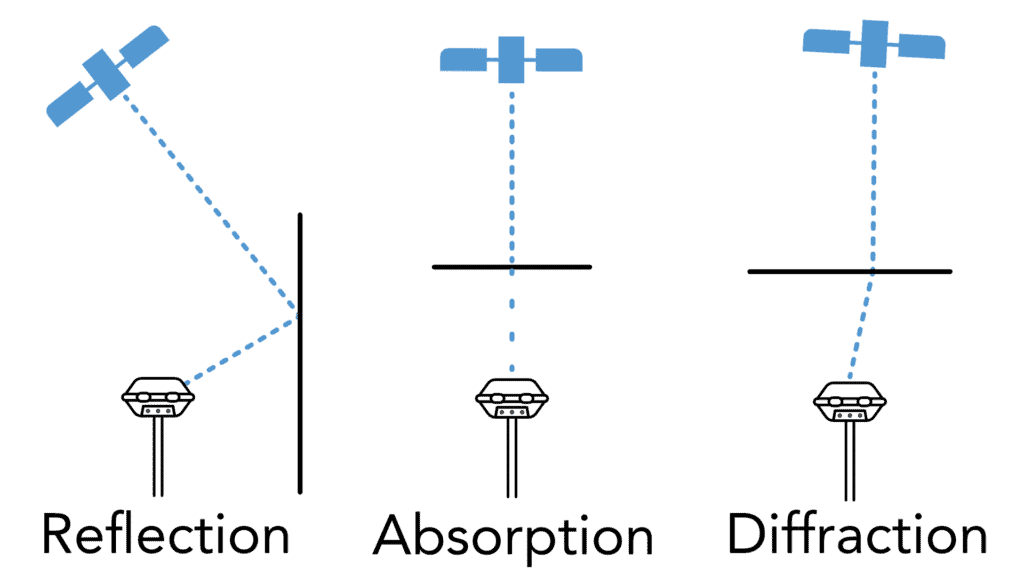
While standard GPS is suitable for general navigation, it’s often off by several meters due to various sources of error. These errors can arise from atmospheric interference, slight variations in satellite orbits, signal delay, and even the reflection of signals off nearby objects. For surveyors, who need high accuracy, these potential errors are far too large, leading to the development of systems like RTK GPS to improve upon traditional GPS. Check out our article on some of the things that can affect RTK (and GPS): Factors Affecting RTK Performance: An In-Depth Guide for Surveyors.
Real-Time Kinematic (RTK) GPS is a method that enhances the accuracy of GPS positioning to within a few centimeters. RTK GPS works by setting up a “base station” at a known, fixed location. This base station receives signals, and then broadcasts the information it sees to a rover receiver. In order to work, the base and rover must see the same signals from the same satellites. The rover receiver is then able to move around the work site, and calculate a position to within a centimeter.
An RTK GPS system corrects errors in real-time by comparing the satellite signals received at the base station with the signals received at the rover. Since the base station’s position is known and fixed, it can identify errors in the satellite signals and calculate a correction factor. This correction data is then sent to the rover, which adjusts its own position calculations accordingly, resulting in far greater RTK GPS accuracy. In practice, this means that the rover is accurate relative to the base. Check out the video below to get a better idea of what this means for you in the field.
In an RTK GPS system, the main components are the base station and the rover. The base station is a stationary receiver placed at a fixed, known location that communicates with satellites and provides correction data. The rover is a mobile receiver that surveys the desired area and applies real-time corrections from the base station. As the two instruments do not rely on line of sight to perform measurements like traditional optical instruments, you can survey over large areas. Check out this video to see just how far: Unlimited Base and Rover Range? Together, these components create a precise, high-accuracy GPS system suitable for surveying and other applications requiring high precision.

The relationship between the base station and the rover is essential to RTK GPS accuracy. The base station is set up at a known (or unknown), precise location and receives signals from GPS satellites. Because its position is already established, it can detect any deviations in the satellite signals. This deviation is often due to errors caused by the atmosphere, slight variations in satellite orbit, and other factors. The rover, on the other hand, is the mobile GPS receiver that needs accurate positioning for tasks like surveying. As the rover moves around, it also receives satellite signals but relies on the base station’s data to adjust these signals for improved RTK GPS accuracy. By constantly receiving correction data from the base station, the rover can accurately determine its position down to just a few centimeters, even when moving and in real-time (hence the real-time part of real-time kinematic).
The real-time correction process in RTK GPS involves the base station analyzing the satellite signals it receives and calculating the errors or discrepancies. These discrepancies are then broadcast to the rover. The rover receives this correction data and uses it to adjust its own position calculations in real-time. First, both the base station and the rover receive signals from multiple satellites. The base station detects any inaccuracies in the satellite signals, given its known location, and calculates correction data. The base station transmits this correction data to the rover via radio signals or cellular networks, depending on the setup. The rover then applies this correction data to its GPS calculations, allowing it to achieve much greater positioning accuracy.
Correction data from the base station is transmitted to the rover using one of several communication methods. For example, if the base station and rover are close, typically within 10 kilometers, radio signals are used to transmit correction data in real time. In many modern RTK GPS setups, especially those operating over larger distances, cellular networks provide a continuous connection between the base station and the rover. In some cases, multiple base stations are networked together to provide real-time correction data over a broader area, a method known as Network RTK. Each communication type has its advantages, with radio signals providing highly localized accuracy and network RTK enabling broader, regional accuracy improvements.
The Hemisphere S631 uses an internal Satel 1 Watt radio that can broadcast radio corrections up to 11 km from the base station.
Understanding RTK GPS precision is fundamental for obtaining reliable and repeatable results in the field. While these terms are often used interchangeably, they have distinct meanings. Accuracy refers to how close a measurement is to the true value, which is crucial in RTK surveying for obtaining positions that reflect actual points on the Earth’s surface. RTK GPS precision, on the other hand, is about the consistency of measurements, how closely repeated measurements agree with each other, regardless of whether they are close to the true position.
In RTK surveying, achieving both high accuracy and high precision is essential. An accurate survey provides measurements that are close to the true position, and a precise survey ensures that these measurements are consistent. Without both, results can either be inconsistent or systematically offset, leading to potential errors.
Without known control, RTK systems are simply precise. The rover is precise relative to the base. It is not until you either perform a localization or a known position setup at the base, that you will achieve accurate results. Localization aligns the base station’s coordinates with a local coordinate system, while a known position setup uses fixed control points to eliminate systematic errors, ensuring that surveys are reliable and accurate. We have a full video and article on this topic! Check them out: Surveying With RTK: What is the Difference Between Accuracy And Precision.
Standard GPS and RTK GPS are built on the same underlying satellite infrastructure, but they differ fundamentally in how they handle error correction, and the gap in RTK GPS accuracy versus traditional GPS is substantial.
Standard GPS receivers calculate position by measuring signal travel time from satellites alone. This process is subject to a range of error sources (atmospheric delays, satellite orbit variations, clock drift, and multipath) that collectively push standalone GPS accuracy to anywhere between 3 and 10 meters under typical conditions. For navigation and general-purpose use, this is entirely adequate. For surveying, it is not.
RTK GPS closes this gap by introducing a base station that monitors the same satellite signals in real time and continuously calculates the errors present in those signals. Because the base station’s position is precisely known, it can isolate the error component and broadcast corrections to the rover. The rover applies these corrections on the fly, reducing positional error from several meters down to 1–3 centimeters in typical operating conditions.
The practical difference is significant. A traditional GPS receiver staking out a property corner might place that corner 5 meters from its true location. An RTK GPS system, under the same satellite conditions, would place it within 2 centimeters. For construction layout, boundary surveys, and precision agriculture, that distinction determines whether a project is done right or done over.
Multi-frequency RTK receivers, such as the Hemisphere S631, push RTK GPS accuracy further by tracking signals across multiple constellations and frequencies simultaneously. This increases the number of available satellites, reduces initialization time, and improves performance in challenging environments like urban corridors and dense vegetation.
RTK GPS systems address several types of errors to achieve high-precision positioning. Here are the main sources of errors and how RTK GPS corrects for them. Ionospheric and tropospheric delay occurs as GPS signals travel through Earth’s atmosphere, where they are affected by varying air densities and ionized particles, causing signal delays. Many of the newest 7th generation RTK receivers (like the Hemisphere S631) model the ionosphere in the RTK engine to account for these delays and refractions. Multipath error occurs when GPS signals bounce off objects like buildings or trees before reaching the receiver, causing the signals to take longer paths. Since the base station is usually in an open area with minimal obstructions, it can detect and account for these multipath errors. Lastly, orbital errors arise from slight deviations in satellite orbits, which can cause small inaccuracies in positioning. By referencing the known position of the base station, the RTK system can account for these deviations and send the appropriate corrections to the rover. With the base station continuously correcting for these types of errors, the rover can maintain high accuracy even in environments that might otherwise distort GPS signals.
RTK GPS has found applications not only in surveying but also across numerous other fields requiring precise location data. In land surveying, surveyors can measure land with incredible RTK GPS precision, making it easier to define boundaries and prepare sites for construction. In agriculture, farmers use RTK GPS for precision agriculture, enabling them to plant crops in specific locations and improve yield efficiency. Construction companies also rely on RTK GPS to align structures and ensure that each element of a project is placed correctly. Additionally, RTK GPS is valuable in drone mapping. Drones equipped with RTK GPS can capture high-precision aerial images, which are useful in applications like mapping and environmental monitoring. RTK GPS’s centimeter-level accuracy has made it invaluable in any field where positioning and measurement accuracy are critical, resulting in better resource management and improved project outcomes. Check out our video on how RTK can be used to build swales on a farm.
Fence layout places unique demands on positioning accuracy, alignment, and repeatability. Unlike many surveying tasks, fencing often spans long distances, uneven terrain, and obstructed sightlines. RTK GPS addresses these challenges by allowing fence lines to be defined mathematically rather than visually, ensuring consistency from start to finish regardless of terrain or visibility constraints.
Compared to total stations, RTK GPS eliminates line-of-sight requirements, minimizes setup time, and supports single-person operation. The advantages below make RTK particularly well-suited for long fence runs, rolling terrain, and agricultural or ranching environments where efficiency and repeatability are critical.
RTK GPS enables perfectly straight fence lines even when the endpoint is not visible from the starting position. By recording coordinates at the start and end of a fence run, survey software can generate a straight digital line between the two points. Stakes placed along this line remain aligned across hills, vegetation, or long distances where traditional visual alignment is not possible.
Many fencing projects require the fence to be set back from a property boundary by a fixed distance. With RTK GPS, property lines can be recorded precisely and an offset line generated automatically. This removes manual tape measurements and reduces cumulative error, ensuring the fence remains consistently offset while preserving straight alignment.
In RTK surveying, accuracy and precision are often discussed together, yet they describe fundamentally different aspects of measurement quality. Understanding how these concepts differ and how they interact within an RTK workflow helps surveyors interpret results correctly, diagnose field issues, and choose the right corrective actions when positions do not behave as expected.
In RTK surveying, accuracy and precision describe two different aspects of measurement quality, and understanding how they interact is essential for interpreting results in the field. Accuracy refers to how close a measured position is to its true, real-world location, while precision describes how consistent repeated measurements are relative to each other.
RTK GPS systems are inherently precise because the rover continuously calculates its position relative to the base station using the same correction source. This means that repeated measurements will typically cluster very tightly, even in challenging environments. However, precision alone does not guarantee accuracy. If the base station is set up with incorrect coordinates, the rover’s measurements may be consistent but systematically shifted from the true position.
Accuracy in RTK surveying is therefore primarily established at the base station. When the base is placed on a known control point or aligned through localization, the corrections applied to the rover ensure both RTK GPS precision and accuracy are achieved. Without this step, RTK results may appear stable and repeatable but still be offset from true ground coordinates.
Recognizing the difference between these two concepts helps surveyors diagnose issues in the field. A stable but incorrect position often points to an accuracy problem at the base, while scattered measurements usually indicate precision issues caused by poor satellite geometry, signal interference, or multipath. Understanding which condition you are dealing with allows you to apply the correct solution, whether that means relocating the base, performing a localization, or adjusting the measurement strategy.
Agriculture is one of the fastest-growing application areas for RTK GPS, and the reasons are straightforward: modern farming operations demand the same centimeter-level repeatability that surveyors have relied on for years.
In precision agriculture, RTK GPS is used to guide tractors, planters, and sprayers along exact paths across fields. Unlike standard GPS-guided equipment, which can drift by several meters between passes, RTK-guided machinery maintains consistent row spacing, reduces overlap, and eliminates gaps. Over a full growing season, this translates directly into reduced seed waste, lower input costs, and improved yields.
RTK GPS is also used for field mapping and drainage planning. By capturing accurate elevation data across a field, farmers and agronomists can identify low spots, design drainage systems, and model water flow with the same precision used in civil engineering projects. The ability to map and re-survey the same field year over year (returning to the same base point and matching previous data exactly) is something only RTK GPS accuracy makes possible.
Variable rate application is another area where RTK GPS precision delivers measurable results. When equipment knows its exact position within a field, it can apply fertilizer, herbicide, or seed at rates calibrated to specific zones, reducing waste and environmental impact while maximizing productivity in high-potential areas.
For operations that run equipment around the clock or across multiple operators, the consistency that comes with RTK GPS precision is particularly valuable. Results don’t vary based on who is in the cab or what time of day it is; the system delivers the same sub-centimeter positioning every time.
RTK GPS delivers exceptional positioning performance, but it is not without constraints. Understanding the conditions that limit RTK GPS precision helps users plan their work more effectively and avoid situations where results may be compromised.
Signal obstruction is one of the most common limitations. In environments with dense tree canopy, tall buildings, or significant terrain features, satellite visibility can be reduced to the point where maintaining a fixed RTK solution becomes difficult. While modern 7th generation receivers like the Hemisphere S631 have significantly improved performance under canopy compared to earlier equipment, severely obstructed environments still present challenges for consistent RTK GPS accuracy.
Baseline distance is another factor. As the rover moves further from the base station, the correction data becomes less representative of the satellite signals the rover is actually receiving. In practice, RTK GPS precision degrades gradually with distance, and most manufacturers specify performance figures at baselines of up to 20–30 kilometers. Beyond that range, accuracy can no longer be guaranteed at the centimeter level.
Multipath interference, where satellite signals reflect off nearby surfaces before reaching the receiver, affects both the base station and the rover. While RTK processing can account for some multipath at the base, a rover operating in a dense urban environment or near large reflective structures will still experience degraded precision compared to an open-sky setup.
Initialization, or achieving a fixed RTK solution, requires a minimum number of satellites with adequate geometry. In areas with limited sky view, initialization can take longer or may not be achievable at all. Operating under a fixed solution is fundamental to RTK GPS accuracy; a float solution, where ambiguities have not been fully resolved, produces significantly less precise results.
Finally, the quality of the base station setup directly limits the accuracy of the entire system. A base placed in a poor location, set up with incorrect coordinates, or subject to movement during the survey will introduce errors that no amount of rover-side processing can correct. RTK GPS precision ultimately starts with a solid, correctly configured base.
Real-Time Kinematic (RTK) GPS is a breakthrough technology in precision surveying, enhancing the standard GPS with real-time corrections to achieve centimeter-level accuracy. By using a base station to correct errors in GPS signals and relaying this data to a rover, RTK GPS allows surveyors and other professionals to work with incredible precision. From mapping to agriculture and construction, RTK GPS has revolutionized fields that rely on accurate positioning. As RTK technology continues to improve, the applications and accessibility of high-precision GPS are likely to expand, making it an essential tool for the future of precision-based work.
RTK GPS, or Real-Time Kinematic GPS, is an advanced GPS position technique that improves positioning accuracy to within a few centimeters. Unlike standard GPS, which often has a positioning error of a few meters, RTK GPS uses a fixed base station that sends real-time correction data to a mobile receiver (or rover) in the field. This real-time correction process compensates for common sources of GPS error, such as atmospheric interference, to deliver far more accurate measurements.
An RTK GPS system consists of a stationary base station and a mobile rover. The base station is set up at a known, fixed location and receives satellite signals. Since its position is known, the base station can detect any inaccuracies in the GPS signals and calculate a correction factor. It then sends this correction data to the rover, which uses it to adjust its own position calculations in real-time, allowing it to achieve highly accurate positioning.
Correction data is typically transmitted from the base station to the rover using one of three main methods: radio signals, cellular networks, or Network RTK. Radio signals are effective over short distances (up to about 10 kilometers), while cellular networks can extend the range of real-time corrections over larger areas. Network RTK combines multiple base stations to provide correction data over broader regions, making it ideal for larger surveying projects.
The main sources of GPS error include ionospheric and tropospheric delays, multipath errors (signal reflections off surfaces like buildings), and orbital errors. RTK GPS corrects for these errors by comparing the signals received at the base station (in a known, fixed location) with those received by the rover. The base station detects inaccuracies and transmits correction data to the rover, which then adjusts its position calculation accordingly. This correction process allows RTK GPS to maintain centimeter-level accuracy.
RTK GPS is used in a variety of fields beyond surveying, thanks to its high accuracy. In agriculture, it supports precision farming by helping farmers plant crops with exact spacing. Construction projects use RTK GPS for positioning structures and aligning components precisely. It’s also essential in drone mapping, where it enables high-precision aerial imaging for mapping, environmental monitoring, and land use planning.
Bench Mark Equipment & Supplies is your team to trust with all your surveying equipment. We have been providing high-quality surveying equipment to land surveyors, engineers, construction, airborne and resource professionals since 2002. This helps establish ourselves as the go-to team in Calgary, Canada, and the USA. Plus, we provide a wide selection of equipment, including global navigation satellite systems, RTK GPS equipment, GNSS receivers, and more. We strive to provide the highest level of customer care and service for everyone. To speak to one of our team today, call us at +1 (888) 286-3204 or email us at [email protected]
